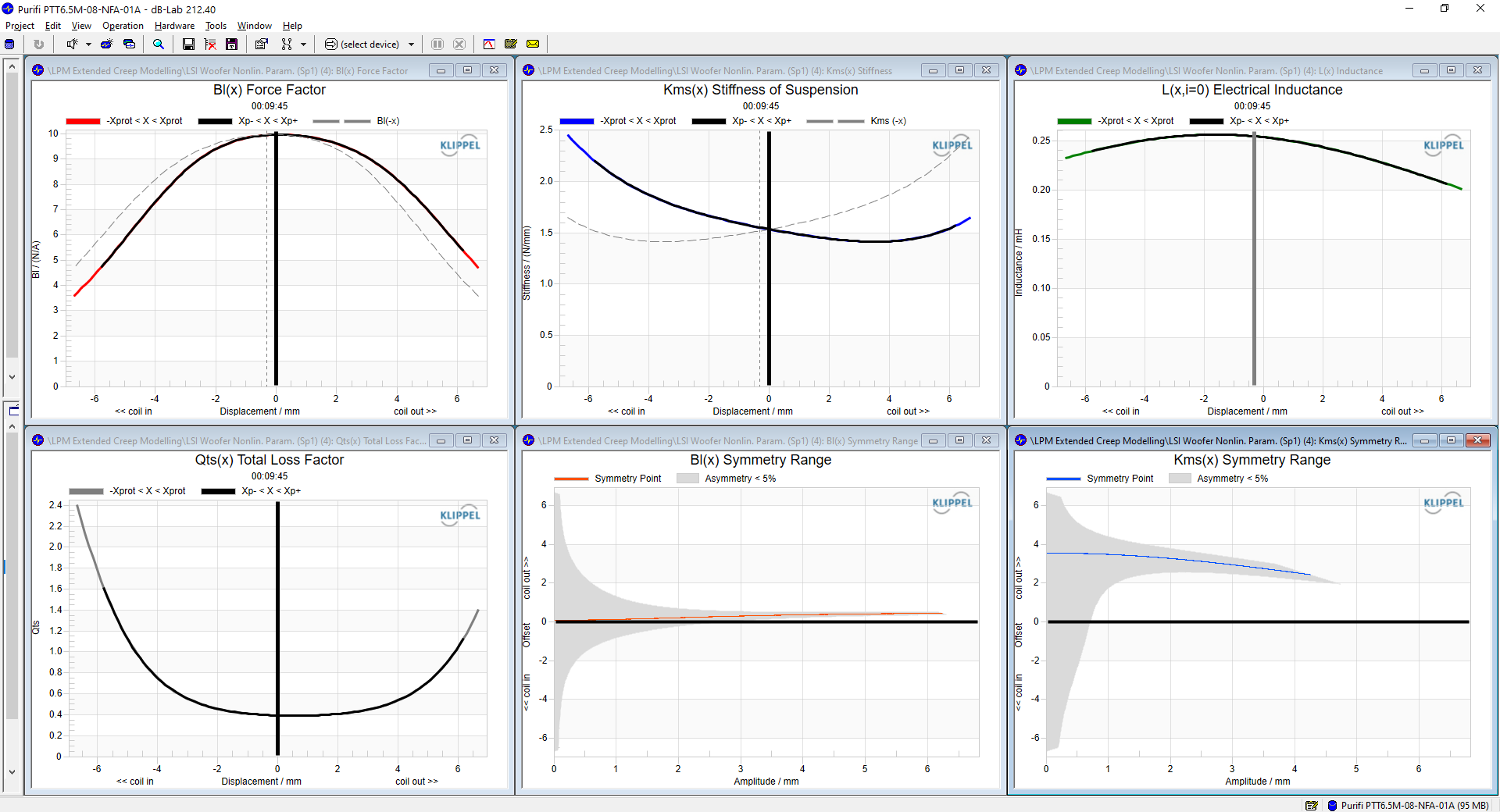
I am trying to model the cone movement as a finction of the voltage applied to the motor over time.
I see the BL curve, and I could model the current from the voltage and the impedance curve. And generate a motor force.
And I could then subtract from the KMS of the suspension.
And then later the mass of the cone and voice coil, would directly affect the acceleration… assuming that that even matters… which it probablt does more for a woofer than a tweeter.
But there is also the mass of the air coupled to the cone, and the rarefied air on one side pulling the cone, and the compressed air on the other fighting the cone force.
And then if the voice coil is unpowered, it will gradually move towards zero as the KMS pulls it back… and maybe get there more quickly if the impedance across the terminals is high.
Is there a particular website or book that describes the physics that I would need to model all this to first order?
I see the BL curve, and I could model the current from the voltage and the impedance curve. And generate a motor force.
And I could then subtract from the KMS of the suspension.
And then later the mass of the cone and voice coil, would directly affect the acceleration… assuming that that even matters… which it probablt does more for a woofer than a tweeter.
But there is also the mass of the air coupled to the cone, and the rarefied air on one side pulling the cone, and the compressed air on the other fighting the cone force.
And then if the voice coil is unpowered, it will gradually move towards zero as the KMS pulls it back… and maybe get there more quickly if the impedance across the terminals is high.
Is there a particular website or book that describes the physics that I would need to model all this to first order?